A vector in three-dimensional space is a triple \(\bm{v} = \langle v_1, v_2, v_3\rangle\) that, without any other context, denotes movement from the origin to the point \(\bigl(v_1, v_2, v_3\bigr).\) The numbers \(v_1\) and \(v_2\) and \(v_3\) are called the \(x\)-, \(y\)-, and \(z\)-components of the vector. Sometimes we talk about the vector from a point \(A\) to a point \(B,\) which we’ll denote \(\overrightarrow{AB}.\) The points \(A\) and \(B\) are referred to as the initial and terminal point respectively. Given two vectors (forces) \(\bm{u}\) and \(\bm{v}\) applied one after the other to a point (object), the resultant vector (force) is the sum \(\bm{u}+\bm{v}.\) If a vector (force) \(\bm{u}\) is scaled by a factor of \(k\) then \(k\bm{u}\) will denote the scaled vector. In terms of their components, \[ \bm{u} = \langle u_1, u_2, u_3 \rangle \quad \bm{v} = \langle v_1, v_2, v_3 \rangle \quad \implies \quad \bm{u} + \bm{v} = \langle u_1+v_1, u_2+v_2, u_3+v_3 \rangle \quad k\bm{u} = \langle k u_1, k u_2, k u_3 \rangle. \] The vector \(-\bm{v}\) will have the opposite direction as \(\bm{v}.\) The length of a vector \(\bm{v}\) is referred to as its magnitude (or sometimes its modulus), and is denoted \(|\bm{v}|.\) The magnitude of a vector \(\bm{v} = \langle v_1, v_2, v_3 \rangle\) can be calculated explicitly in terms of its components as \(\sqrt{v_1^2 + v_2^2 + v_3^2}.\) The unit coordinate vectors \({\mathbf{i} = \langle 1,0,0 \rangle}\) and \({\mathbf{j} = \langle 0,1,0 \rangle}\) and \({\mathbf{k} = \langle 0,0,1 \rangle}\) are the unit vectors pointing in the direction of each coordinate axis. As a matter of notation, we sometimes write \(\langle v_1,v_2,v_3 \rangle\) as \(v_1\mathbf{i} + v_2\mathbf{j} + v_3\mathbf{k}.\)
 For vectors \({\bm{u} = \langle u_1,u_2,u_3 \rangle}\)
and \({\bm{v} = \langle v_1,v_2,v_3 \rangle}\)
their dot product is calculated as
\({\bm{u}\cdot\bm{v} = u_1v_1 + u_2v_2 + u_3v_3} = |\bm{u}||\bm{v}|\cos(\theta).\)
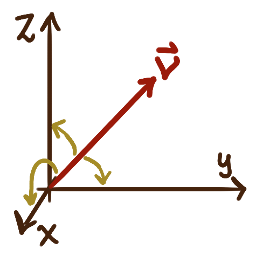
The direction angles of a vector \(\bm{v}\)
are the three angles between \(\bm{v}\) and each of the three coordinate axes.
The cosines of these angles are referred to as the vector’s direction cosines.
If \(\alpha\) and \(\beta\) and \(\gamma\) are the direction angles of \(\bm{v}\)
with the \(x\)- and \(y\)- and \(z\)-axis respectively, then
\[
\cos(\alpha) = \frac{v_1}{|\bm{v}|}
\quad \cos(\beta) = \frac{v_2}{|\bm{v}|}
\quad \cos(\gamma) = \frac{v_2}{|\bm{v}|}
\qquad \bm{v} = \Bigl\langle |\bm{v}|\cos(\alpha), |\bm{v}|\cos(\beta), |\bm{v}|\cos(\gamma) \Bigr\rangle \,.
\]
For vectors \({\bm{u} = \langle u_1,u_2,u_3 \rangle}\)
and \({\bm{v} = \langle v_1,v_2,v_3 \rangle}\)
their dot product is calculated as
\({\bm{u}\cdot\bm{v} = u_1v_1 + u_2v_2 + u_3v_3} = |\bm{u}||\bm{v}|\cos(\theta).\)
The direction angles of a vector \(\bm{v}\)
are the three angles between \(\bm{v}\) and each of the three coordinate axes.
The cosines of these angles are referred to as the vector’s direction cosines.
If \(\alpha\) and \(\beta\) and \(\gamma\) are the direction angles of \(\bm{v}\)
with the \(x\)- and \(y\)- and \(z\)-axis respectively, then
\[
\cos(\alpha) = \frac{v_1}{|\bm{v}|}
\quad \cos(\beta) = \frac{v_2}{|\bm{v}|}
\quad \cos(\gamma) = \frac{v_2}{|\bm{v}|}
\qquad \bm{v} = \Bigl\langle |\bm{v}|\cos(\alpha), |\bm{v}|\cos(\beta), |\bm{v}|\cos(\gamma) \Bigr\rangle \,.
\]